


















Explosion-proof tank scale is a new type of machine, which is controlled by PLC programmable device, which is set and measured by weighing sensor platform under the control of microcomputer program. Through the power track, the packaging barrel is accurately transported to the filling nozzle, reaching the filling target value, the filling head is automatically raised, and the two filling methods of net weight/gross weight are free to choose.

 020-34563445
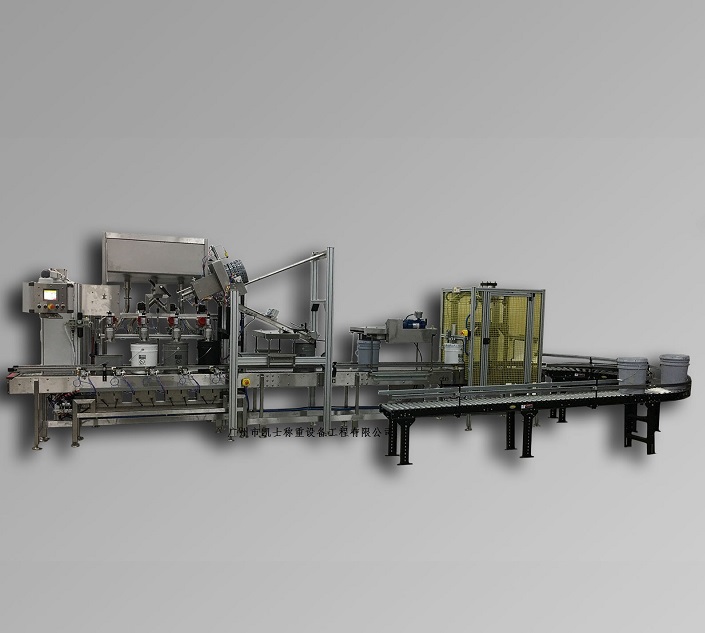
020-34563445The explosion-proof can scale is a new type of machine that integrates mechanics, electricity and instrumentation, with the load cell platform set for measurement under the control of a microcomputer program. It is controlled by a PLC programmable device. The packaging drums are precisely conveyed to the bottom of the filling nozzle through the power track. When the filling target value is reached, the filling head will automatically rise. Two filling methods, net weight and gross weight, can be freely selected. 30 sets of formulas can be set and stored for invocation. The filling target quantity can be freely set, facilitating packaging of various weights.
The weighing and Filling machine collects and processes weight data through communication and sends tare signals to make the instrument tare. In the quantitative filling mode, the PLC, as the main controller, receives data from the weighing instrument, processes the data and then sends a series of signals to control the filling operation to complete the quantitative filling. It conducts real-time measurement and control of the full bucket in place, clogging, capping, opening/closing of the filling valve, etc. The PLC signal is used to drive the motor and other transmission mechanisms to move the mechanical hand. At the same time, the encoder built into the drive motor feeds back the pulse number to the driver. The driver compares the two pulses and determines the deviation. The correction signal obtained after calculation according to certain control rules is used as the given signal of the speed controller in the servo driver, and then the current is regulated and the power is amplified. Make the grasping manipulator move in the direction that eliminates deviation, thereby achieving the stacking positioning of the manipulator.













