




PRODUCTS
产品中心

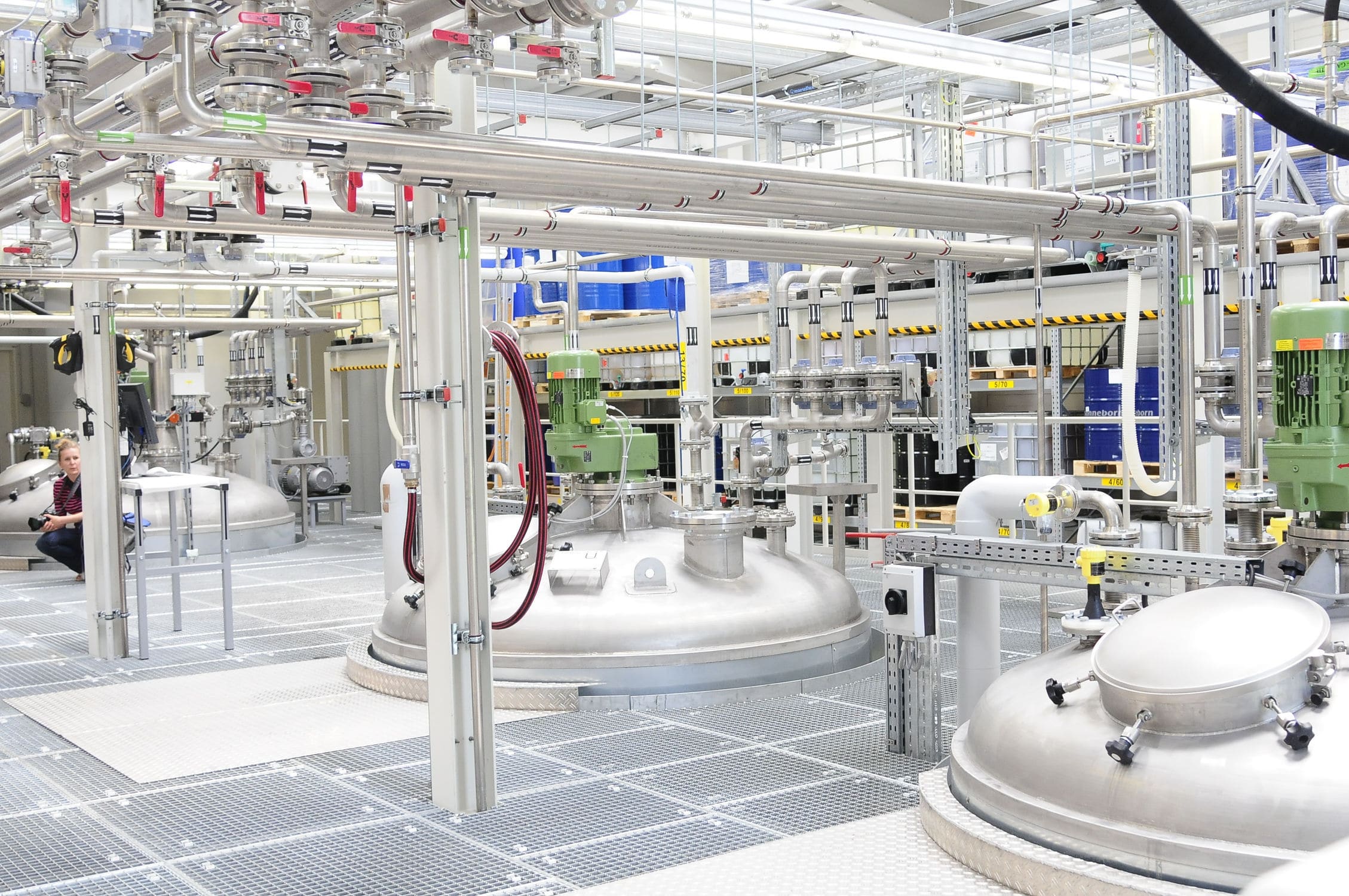












NSB称重灌装线



产品详情
 020-34563445
020-34563445自动填充机选用SIEMENS公司的S7-200系列PLC,由于需要输出高速脉冲驱动伺服电机,PLC采用晶体管输出型。选用S7-200-226 DC/DC/DC型PLC。伺服驱动器采用松下MADDT1207003全数字交流永磁同步伺服驱动装置。抓取机械手装置整体安装在直线运动传动组件的滑动溜板上,在传动组件带动下整体作直线往复运动,定立到其他各工作单元的物料台,然后完成抓取和放下灌装桶的功能。伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的线数。
计量灌装机的主要作用是将液体介质充填到包装容器中实现灌装、封口、称量、堆垛等功能。采用顺序控制、运动控制、通信、数据管理微处理机技术和通信技术,对输入信号进行过滤、判断以及存储等,将输出信号的形式传送给灌装系统的执行机构来完成灌装命令,对在线容器中桶位的实时控制,用压力控制对灌装桶预压,对输送链道速度的调节,当输送链道上容器堆堵时,还需协调整个生产线各拖动点的进给速度。协调信号是到生产线中其它输送链拖动,控制系统还对空/满桶的到位、堆堵、下盖、打开/关闭灌装阀等进行实时捡测与控制。利用PLC信号驱动电机等传动机构带动机械手移动,同时驱动电机自带的编码器反馈位詈脉冲数给驱动器驱动器对两种脉冲进行比较并确定偏差,按一定控制规律运算后得到的校正信号作为伺服驱动器中速度控制器的给定再经电流调节与功率放大,使抓取机械手朝消除偏差的方向运动,从而实现机械手的堆垛定位。







液体抽料混合配料系统的应用
配料系统采用双CPU构成冗余系统,由西门子公司提供的 STEP7MicroWin V4.0SP6 编程软件作为人机界面编写程序调试程序、下载程序等。PC 机与PLC 实验机用一根PC/PPI电缆连接进行通信,并对相应的参数进行设置。

自动液体灌装机功能应用
自动液体灌装机由变频器控制,实现无级变速,设定目标重量,操作简单灌装速度快,采用大、小两段给料灌装方式,可选配电脑连线或实时打印灌装日期、序号、净重、皮重、累计重量等灌装参数。


