


















 020-34563445
020-34563445输料地磅实现远程监控和数据管理功能,采用组态王软件在工控中的应用极大地方便了操作人员与工程开发人员,由防爆地磅进行称重并实时计量,PLC计算得实时重量及累计重量。经PID调节改变输出信号以控制变频器对输送电机的速度调节,从而实现重量控制,采用变频器是采用磁通矢量控制技术、脉宽调制(PWM)原理和智能功率模块的高性能变频器。
电子地磅为了实现上述监控要求,监控界面采用埴充效果、流动快的流动属性设置模拟了动态灌装过程;通过添加标准按钮实现手动/自动选择、启动、停止、急停及手动打开泵、电磁阀、通过设置标签的显示输出属性实现灌装质量的设定实时显示,灌装桶数的设定及当前灌装桶数显示等组态监控画面对灌装系统运行状态的监控,通过在触摸屏操作实现监控PLC运行的目的,建立系统与外部硬件设备的连接,使得MCGS能从外部设备读取数据并控制外部设备的工作状态,实现灌装过程的实时监控。
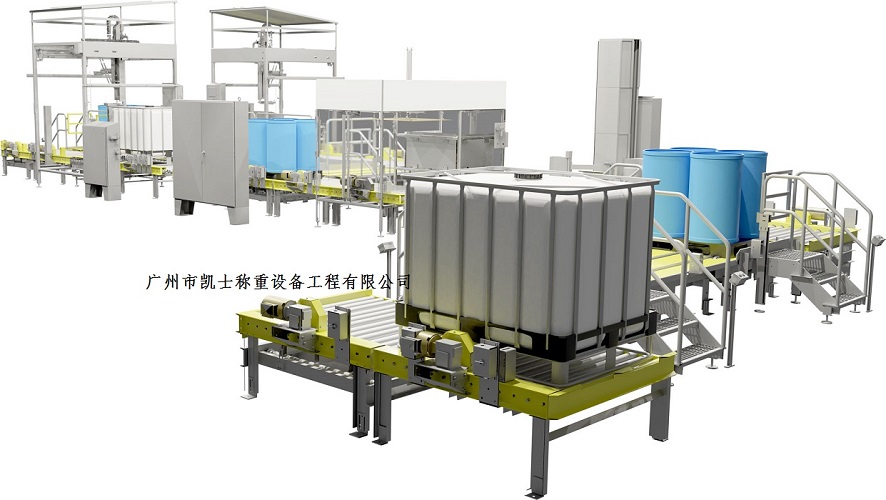
地磅灌装秤是性能更加良好的自动灌装机,是在传统灌装工位上,加载了精确度较高的动态电子地磅,灌装时利用电子地磅对物料进行称量,从而达到定量灌装的目的。液体灌装机主要包括了油液箱、灌装设备、动作控制系统等多个部位组成,在油液箱部内部,放入了一个小球,并设计了最大值与最小值,当油料下降到最小值位置上时,设备自动加料,当油料下降到最大值位置上时,自动终止加料。灌装时由两次完成。首先将空桶运送到灌装位置,采用大流量的灌装速度,使灌装速度得以提升。然后将桶运送到位置,采用小流量的灌装速度,使桶内油液达到灌装的重量要求。最后通过位置将完成灌装的物料桶运输出去。
定量地磅主要由封头、气缸、端盖等部位构成,物料流入该设备内的过程中,靠泵来控制重量,需保证物料具有较强的流动性。气缸在初始位置上时,灌装前按照灌装的速度,并结合物料的流动性,通过对螺杆进行调节,封头和端盖的距离将稳定在最佳位置上,为大流量灌装的进行打下了良好基础。在物料灌装时,随着物料的灌入,重量逐不断提升,当重量达到与前期设定重量值相差1%时,气缸产生了变化,使封头向下移动,当物料继续灌入,达到预定要求时,气缸再次出现变化,封头缓慢向下移动,封头与端盖的距离使其与容器紧密接触,并终止灌装。
计量地磅主要由箱体、浮球、出料口等多个元件构成,在物料灌装机灌装的过程中,当物料低于最小值时,浮球压板出现移动,远离机械阀,使气动阀自动开启,从进料口的位置上,注入物料,随着物料的注入,油液面逐渐上升,浮球沿着逆时针方向运动,当物料注入到最大值时,浮球压板回到原始状态,与机械阀6连接到一起,气动阀闭合,终止物料液体的注入。
灌装地磅包括了气控阀、机械阀与气动阀等三个控制元件,对三个控制元件选择时,气控阀为敞开式,其他两个控制元件为常闭式。闭合气源后,外界气体由气控阀进入,对气动阀进行了控制,使其产生启动活动,从而将物料推送到油液箱中。随着油液箱内物料的注入,内部物料高度不断的上升,当升高到最大值位置上时,对浮球压板产生了作用,使其与机械阀相接处,闭合流向气动阀的气体,气动阀完全闭合后,终止油液箱物料的导入。而在灌装的过程中,不断将油液箱中的物料灌入到空桶内,油液箱内液位逐渐降低,当液位降低到最小值后,浮球压板逐渐上升,与机械阀完全脱离,在弹簧的带动下,机械阀与气控阀全部恢复到原来的位置上,物料再次通过上述流程进入到油液箱中。
地磅灌装系统进桶运输设备对空桶运输的过程中,首先经过光电传感器,当其采集到空桶信号时,在气缸活动下,使塞杆出现运动,进而将空桶推到电子地磅上,直到灌装正下方停止运动。气缸为复动型气缸,内部包括了两个行程,当空桶运输到光电传感器时,采集到空桶信号后,在气缸活动下,塞杆逐渐回缩,灌装设备全部开启,使物料流入到空桶内,同时电子秤发出信号,塞杆完成行程,使灌装口变为最小。随着物料逐渐的灌入,达到要求值时,电子秤再次发出信号,塞杆完成行程,使灌装口完全闭合,完成整个物料灌装活动,并将物料桶运输出去。













